
Some time ago, the electric racing car Grimsel built by the students of the ETH Zurich and Lucerne University of Applied Sciences and Arts achieved an acceleration of 1.785 seconds from zero to one hundred kilometers, breaking the record previously held by the Formula Racing Team of the Dutch Delft University of Technology – 2.134 second. For reference, the Bugatti Weihang 16.4 Super Sport accelerates 2.46 seconds per 100 kilometers, and the electric car has no shifting delay. The advantages of being naturally suitable for acceleration have been shown perfectly.
In order to popularize the professional knowledge of electric racing, this article takes the racing DUT14 built by Delft University of Technology as an example to introduce briefly. The data was collected from the official website of the Dutch DUT team.

Powertrain
The Dut14 racing car's mass is only 149.2Kg, and the 100km speedup is 2.3 seconds. It is driven by four wheel hub motors, type AMK DT5-14-10, which can realize traction torque control and braking energy recovery. The maximum power of a single unit is 27 kW, and the maximum single unit torque is 28N.m. Wheel motor advantages include:
1. It can greatly save the space inside the car, increase the freedom of design, and increase the transmission efficiency;
2. The reaction speed is fast, the response time of the drive motor is only 10ms, which is good for good control effect;
3. Greatly improve the driving dynamics performance of the vehicle. The driving/braking torque of each motor is independently controllable, and the yaw moment acting on the vehicle can be changed by independently controlling the torque of each motor to generate the longitudinal force. Directly controlling each electric wheel realizes steering differential speed and driving non-slip, thereby effectively improving the steering stability of the vehicle.

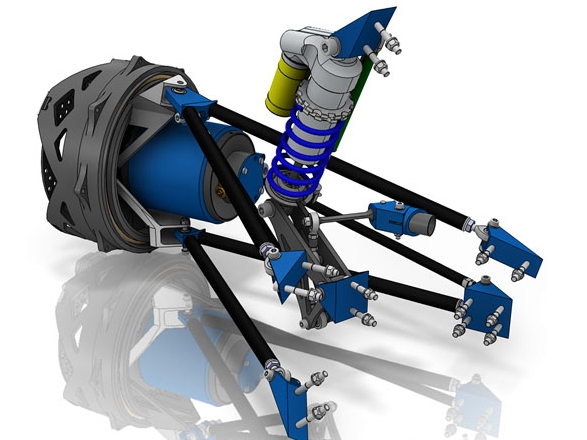
The output current of the lithium battery is direct current, but due to the superior power and light weight performance of the AC motor, the final solution is the power supply combination of the AC motor + inverter. The AMK KwS-26 motor controller was selected and the IGBT inverter was used to control the bandwidth. The four motor controllers corresponding to the four hub motors are arranged under the driver's seat and the efficiency exceeds 98%. In order to ensure safety, it is protected by the carbon fiber shell and communicates with the ECU through the CAN bus.
The DUT team also independently developed the BMS battery management system. Lithium polymer batteries were supplied by Shenzhen Mestar and provided by the KEMA laboratory in the Netherlands. The battery pack consists of 288 cells, each of which is connected in parallel to form 144 battery packs in series, with an output of 85 kW. The braking energy recovery withstands 50 kW. It can absorb up to 6.3 kWh with a voltage of up to 600 V. The total battery system weight is 43 kg. It is divided into two battery compartments. The battery pack is placed near the center of gravity of the vehicle and can withstand a maximum of 2 G acceleration.
Automotive Electronic System
The ECU (Whole Vehicle Control Unit) uses an ARM Cortex M4 microcontroller programmed in C language to control the speed of each motor individually. The system includes a power management module, a security module, and a control module. The power management module needs to convert the relatively low battery voltage to different voltages required by the various electronic systems. When all subsystems are started, the peak load of these transformers can be achieved. 250W. The safety module of the ECU is also very important. The team has considered the safety design of the hardware level in the design. For example, when the system detects the disconnection of the high voltage cable, the ECU automatically cuts off the voltage of all the high voltage cables.
Chassis
The most important thing for a car is the chassis. The chassis needs to support and install the automobile engine and its parts and assemblies to form the overall shape of the car and ensure normal driving.
The DUT14 car uses a carbon fiber monocoque body and TeXtreme offers ultra-light tow unwinding carbon fiber reinforcement to reduce the weight of composite parts by 20% to 30%. The body needs to meet the accuracy of fixing all parts and components while ensuring the driver's safety requirements. These are designed and produced by the student team members themselves.
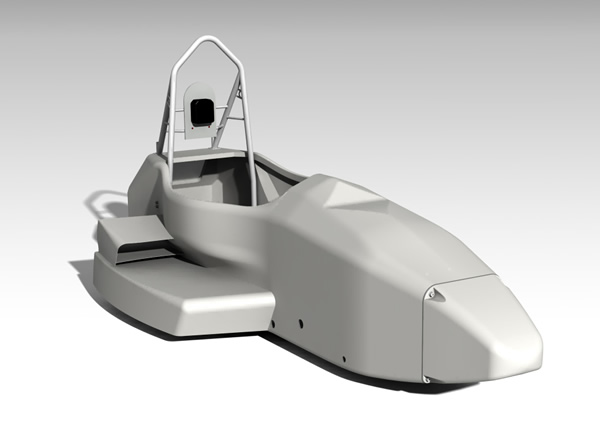
The design goal of the car body is to minimize weight loss to improve performance. For this purpose, the strength and safety of finite element analysis are required to simulate assembly at CATIA. In addition, the body design of the formula car also needs to meet the ergonomic requirements, in order to allow drivers to focus more on the track, the cockpit, steering wheel and racing seats need to adapt to the racer's body while pursuing light weight. With an adjustable pedal box, the steering wheel also adapts to each driver's hand shape to provide sufficient grip during driving.
Racing Dynamics
In recent decades, electronic control systems have been widely used in racing cars and passenger cars. ABS, ESP, and torque vector control have not only improved performance but also improved vehicle stability. Four-wheel hub motors have been used since the DUT13 race car. Provides a vast space for advanced torque control systems.
The DUT14 is equipped with multiple control systems including torque vector control, starting control, ABS, yaw control, etc. It is necessary to set up a complete vehicle dynamic model in the Matlab/Simulink environment.
The controller can detect the sensor failure and proceed with the disposal. Even if the sensor fails, the car can run normally.
The brake system of the car includes a hydraulic brake system and an electromagnetic energy recovery brake system. The brake pad material of the four-wheel disc brakes is worth describing in detail:
In order to pursue more extreme weight reduction and higher performance, the DUT team abandoned the traditional cast iron material on the brake disc. After several months of simulation, discussion and research, DUT finally chose a metal matrix composite material called SupremEX® AMC225XE. It consists of an aluminum alloy matrix and SiC particles (silicon carbide, commonly known as corundum, Mohs hardness of 9.5, second only to The world's hardest diamond has excellent thermal conductivity properties. Compared to the common gray cast iron, the aluminum alloy base has the advantages of low density and high thermal conductivity, making the brake system 50-60% lighter. However, aluminum alloys have relatively poor abrasion resistance and therefore need to be improved by the addition of hard particles. Through the simulation of the thermal performance of the braking system, the DUT found that the aluminum alloy has the disadvantage of a low melting point. However, due to the addition of the four-wheel motor, the electromagnetic braking effect is greatly improved, and this design has feasibility.
In fact, there are also a group of young people in China who are building Formula Student cars. Each participating team follows the rules of the competition and the manufacturing standards of the car. It is only necessary to design and manufacture a small racing car by itself within one year, and it must be able to successfully complete all or part of the competition. In fact, this kind of competition is mainly focused on cultivating college students. It also serves as a platform for the selection of outstanding domestic automobile talents and opportunities for exchanges with international young automotive engineers.

For example, in the fifth China University Formula Auto Race held in Hubei in October 2014, there were 60 fuel racing teams and 20 pure electric racing teams from nearly 70 colleges and universities. A total of more than 2,000 teachers and students participated in the competition, including many in Stuttgart, Germany. University of pure electric racing team, Germany Karlsruhe University of Technology fuel racing team and other top international teams. In the competition, the pure electric formula car "Silver Shark III" created by the students of Beijing Institute of Technology stood out and won the runner-up of the pure electric group (at the same time, it was also the champion of domestic colleges and universities).
"Silver Shark III" racing car uses its own designed battery system and vehicle controller, designed a fast charging system to reduce the charging time to the previous 20% -30%, the transmission uses a self-designed planetary gear reducer; vehicle peak The power is 85KW and the peak torque is 175N•m. The total mass of the entire vehicle is 230KG. The acceleration of 100km is about 3.6s and the maximum lateral acceleration is about 2G.
Peugeot Rear Shaft,Peugeot Shaft,Peugeot Rear Axle Shaft,Peugeot Rear Arm Bearing
Changzhou Yinxin juchuang Automobile Bearing Factory , https://www.yxjcautobearing.com